■コア・フィルタ転圧管理システムの開発
◇開発の背景
|
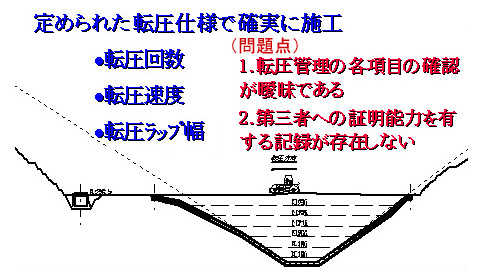
ダム建設の際に、遮水ゾーンの盛立は、定められた転圧仕様に従った確実な施工が不可欠であり、このために特に注意深い施工管理が必要である。
従来の転圧管理の方法によれば、転圧回数、転圧速度などが定められた仕様に従って実施されたかどうかの確認は、目視などに頼らざるを得ず、その記録方法も不十分で、第3者への証明能力を十分に有する記録がないなどの欠点があった。
また、転圧ローラのオペレータにとっても、仕様を確認しながらの作業は負担となっていた。
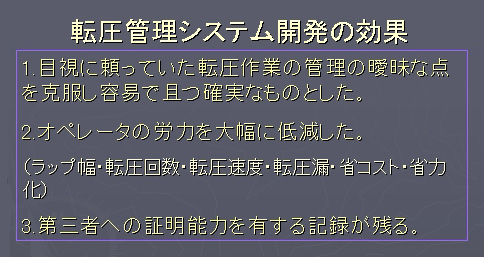
転圧管理システムの開発は、転圧ローラの走行軌跡を自動測定して第三者への証明能力を有する記録を残し、かつオペレータの転圧操作を支援することを目的に行われた。
|
|
|
|
|
|
|
◇転圧ローラ走行軌跡測定方法の選定
|
システムは、転圧ローラの走行軌跡を時系列で測定記録し、これを電算処理して転圧ローラの現在位置、走行速度、転圧予定範囲の転圧回数等のデータを求め、転圧管理と転圧作業支援に利用するものである。
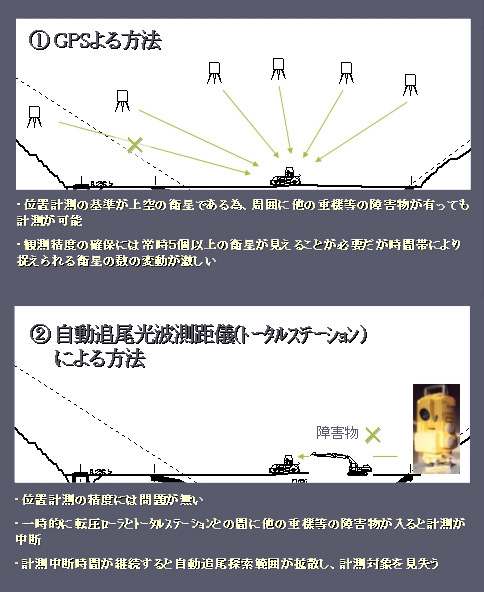
転圧ローラの走行軌跡を自動監視する方法としては、
①GPSによる方法
②自動追尾光波測距儀(トータルステーション)による方法
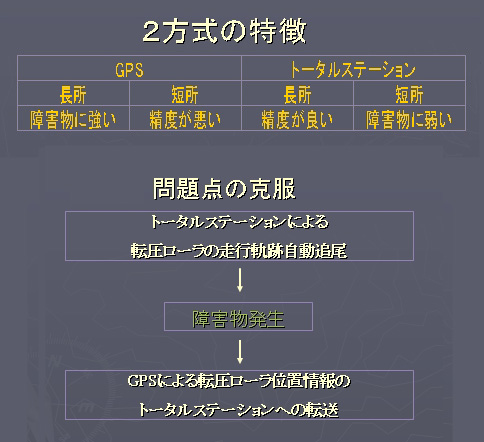
の2種類が考えられたが、それぞれに長短がある。
|
|
|
|
|
|
これら2方式の短所を克服するため、トータルステーションを主とし、一時的に障害物が発生した場合の復旧データの取得用として、GPSによる方法を併用するシステムを採用した。
|
|
|
|
|
[前ページ]
[次ページ]
[目次に戻る]
|